Сканирующая зондовая микроскопия (СЗМ), объединяющая широкий спектр современных методов исследования поверхности, насчитывает более двадцати лет своей истории - с момента создания Биннигом и Рорером сканирующего туннельного микроскопа (СТМ) [1,2]. За прошедшие годы применение зондовой микроскопии позволило достичь уникальных научных результатов в различных областях физики, химии и биологии. Наиболее яркими демонстрациями возможностей этого экспериментального направления при исследовании поверхностей твердых тел могут служить: результаты по прямой визуализации поверхностной реконструкции [3], манипуляция отдельными атомами для записи информации с рекордной плотностью, исследование локального влияния поверхностных дефектов на зонную структуру образца [4] и пр.
Новые возможности рассматриваемого направления в сравнении с традиционными методами исследования поверхности делают особенно перспективным применение зондовой микроскопии (в частности атомно-силовой микроскопии (АСМ) [5]) для изучения биологических и органических материалов. На этом пути в последние годы также был достигнут значительный прогресс. В частности, применительно к исследованиям нуклеиновых кислот, можно упомянуть о таких результатах, как визуализация отдельных молекул ДНК [6] и исследование их конформационного состояния в жидких средах, прямое измерение сил взаимодействия комплементарных нуклеотидов [7], визуализация в реальном масштабе времени процессов взаимодействия ДНК с белками [8].
В то же время, зондовая микроскопия биологических и органических объектов и структур, в том числе полимеров, остается более сложной задачей в сравнении с СЗМ-анализом поверхностей твердых тел. Действительно, прошло более десяти лет с момента возникновения СЗМ, прежде чем была убедительно показана ее адекватность для исследований биообъектов на примере молекулы ДНК [6]. Это связано с такими особенностями подобных объектов, как низкая проводимость (важно при СТМ-исследованиях) и невысокая механическая жесткость. При исследовании микрообъектов актуальной является проблема их иммобилизации на поверхностях твердых подложек в процессах приготовления образцов и при исследованиях (особенно в жидких средах). Важно, чтобы объекты были зафиксированы на подложке в таком состоянии, чтобы было возможно исследовать их интересующие структурные особенности. Возможным подходом к решению этой задачи может служить, например, модификация свойств подложки путем контролируемого осаждения на ее поверхность тонких органических пленок с заданными свойствами.
Весьма важным для адекватного применения зондовых микроскопов в широкомасштабных научных исследованиях является отслеживание и систематизация возможных механизмов возникновения артефактов, т.е. аппаратных эффектов, приводящих к наблюдению ложных или искаженных свойств исследуемого объекта, которое может быть обусловлено, например, воздействием на объект самого инструмента исследования и пр.
Действительно, сканирующий зондовый микроскоп представляет собой ``проектор'', проецирующий объекты и явления микромира на доступный нашему восприятию ``экран'' - в силу многих причин удобно, чтобы им служил экран монитора компьютера. В этом случае проекция становиться отчасти ``осязаемой'', поскольку допускает возможность дополнительного анализа с помощью соответствующего программного обеспечения. Однако подобное ``проецирование'' несет только частичную информацию об объекте, к тому же отчасти искаженную влиянием самого ``проектора''. Восстановление по проекции реальных свойств исследуемых объектов является типичной обратной задачей, требующей решения и для зондовой микроскопии.
Общей чертой всех сканирующих зондовых микроскопов (и определяющей их название) является наличие микроскопического зонда, который приводится в контакт (не всегда речь идет о механическом контакте) с исследуемой поверхностью и, в процессе сканирования, перемещается по некоторому участку поверхности заданного размера.
Контакт зонда и образца подразумевает их взаимодействие. Строго говоря, в общем случае это взаимодействие носит сложный характер. Чтобы осуществлять исследование с помощью конкретного прибора, из широкого спектра выбирается какое-либо одно рабочее взаимодействие. Природа этого выбранного взаимодействия и определяет принадлежность прибора к тому или иному типу в рамках семейства зондовых микроскопов. Информация о поверхности извлекается путем фиксации (при помощи системы обратной связи) или детектирования взаимодействия зонда и образца.
В туннельном микроскопе это взаимодействие проявляется в протекании постоянного тока в туннельном контакте. В основе атомно-силовой микроскопии лежит взаимодействие зонда и образца с силами притяжения или отталкивания. Можно упомянуть о таких разновидностях зондовых микроскопов, как магнитно-силовой микроскоп [9] (зонд и образец взаимодействуют с магнитными силами), микроскоп ближнего поля [10] (оптические свойства образца детектируются через миниатюрную диафрагму, находящуюся в ближней зоне источника фотонов), поляризационный силовой микроскоп [11] (с образцом взаимодействует проводящий заряженный зонд) и т.д.
Миниатюрные размеры зонда и высокая чувствительность детектирующей системы зондовых микроскопов позволяет достигать нано- и субнанометрового пространственного разрешения при детектировании поверхностных свойств (разрешающая способность прибора, как правило, тем выше, чем более короткодействующий характер имеет взаимодействие зонда и образца.)
Процесс сканирования осуществляется при помощи пьезокерамического манипулятора (или системы манипуляторов). Зонд движется последовательно, строка за строкой, вдоль поверхности (изменяются координаты X и Y). Для оцифровки данных участок сканирования разбивается на N строк, а каждая строка на M точек, таким образом, положение иглы в плоскости XY описывается двумя координатами Xi, Yj из множества {Xi, Yj} N×M точек (обычно выбирают N=M). Результатом работы сканирующего зондового микроскопа является установление соответствия между каждой парой координат из множества {Xi, Yj} и некоторым числовым значением (или рядом значений), характеризующим анализируемый параметр поверхности (или ряд параметров).
По способу движения иглы над поверхностью можно провести следующую дифференциацию работы СЗМ.
Таким образом, результатом СЗМ-исследования является получение функциональных зависимостей двух типов: по способу постоянной высоты: F|Z=const(X, Y) и по способу постоянного взаимодействия: Z|A=const(X,Y) (``топография''), плюс какая-либо дополнительная зависимость F|A=const(X,Y). С помощью компьютерного программного обеспечения можно проводить анализ полученных зависимостей (анализ характерных латеральных и вертикальных размеров поверхностных особенностей, построение сечений, фурье-анализ, оценка шероховатости и т.п.), отображать полученные зависимости на экране монитора и выводить их на принтер.
Следует учитывать отличие ``топографического'' массива, полученного в режиме постоянного взаимодействия: {Zij|A=const, Xi, Yj} от реальной топографии поверхности. В случае неоднородного распределения поверхностных свойств, определяющих интенсивность взаимодействия зонда и образца, для извлечения точной информации о топографии объекта необходимо в каждой точке проводить дополнительный анализ взаимодействия зонда и образца.
Например, в туннельной микроскопии реальная геометрия поверхности и карта поверхностного распределения электронных свойств могут быть полностью [12] реконструированы путем анализа трех измеряемых массивов: ``топографии'' в режиме постоянного взаимодействия, первой производной туннельного тока по напряжению смещения и первой производной туннельного тока по величине туннельного зазора.
В сканирующем туннельном микроскопе взаимодействие зонда и поверхности проявляется в протекании постоянного тока в туннельном зазоре между ними. Для плотности туннельного тока (в приближении плоских металлических электродов и вакуумного туннелирования) справедлива формула [13]:
| (1.1) |
| (1.2) |
Из анализа формулы (1.1) следует, что при изменении расстояния зонд-образец на один ангстрем величина туннельного тока изменяется на порядок. Поскольку величина взаимодействия зонд-образец столь существенно зависит от расстояния d, то это позволяет системе обратной связи поддерживать величину d постоянной в процессе сканирования с высокой точностью. Данное обстоятельство обуславливает высокое пространственное разрешение СТМ при определении ``топографической'' функции Z|It=const(X,Y).
Наряду этой зависимостью - ``топографией в режиме постоянного тока'' - в СТМ возможно получение зависимостей типа F|Z=const(X,Y) или F|A=const(X,Y). К первому типу относятся ``токовые'' изображения, полученные в режиме постоянной высоты: It|Z=const(X,Y). Ко второму типу относятся: d ln(It)/d z |It=const(X,Y) и d It/d U|It=const(X,Y), связанные с поверхностным распределением работы выхода j(X,Y) (1.1) и поверхностным распределением плотности электронных состояний r(X,Y,Ef ±eU). Последнее определяется формулой [14]:
| (1.3) |
Получение функциональных зависимостей d ln(It)/d z |It=const(X,Y) и d It/d U|It=const(X,Y) позволяет учесть их вклад в несовпадение Z|It=const(X,Y) с реальной топографией исследуемой поверхности.
В атомно-силовом микроскопе [5] взаимодействие A(X,Y,Z) является силовым взаимодействием зонда и образца.
Характер данного взаимодействия в общем случае достаточно сложен, поскольку определяется свойствами зонда, образца и среды, в которой проводится исследование. В случае исследований незаряженных поверхностей в естественной атмосфере (на воздухе) основной вклад в силовое взаимодействие зонда и образца дают: силы отталкивания, вызванные механическим контактом крайних атомов зонда и образца, силы Ван-дер-Ваальса, а также капиллярные силы, связанные с наличием пленки адсорбата (воды) на поверхности образца.
Зонды для атомно-силового микроскопа имеют форму конуса или пирамиды (рис. 1.1), кончик характеризуется радиусом кривизны R, лежащим, согласно данным фирм-производителей, в диапазоне 5ё40 нм, см. таблицу A.1.
Вычисляя дисперсионное взаимодействие зонда, изображенного на рис. 1.1а, и плоского образца в приближении аддитивности дисперсионного взаимодействия, а также:
| (1.4) |
| (1.5) |
| (1.6) |
Здесь r1 и r2 - плотности материалов зонда и образца, b - константа в законе Лондона [16] для энергии дисперсионного взаимодействия двух нейтральных атомов в вакууме:
| (1.7) |
Для данной константы справедлива оценка b ~ a1a2 Eатом, где a1 и a2 - поляризуемости взаимодействующих атомов, Eатом ~ me4/(h/2p)2 - ``атомная'' энергия (m и e - масса и заряд электрона). Воспользовавшись тем, что a×r - величина безразмерная и для многих элементов имеет порядок 1/10, получим оценку для константы Гамакера: A ~ Eатом/10 ~ 10-19 Дж. Экспериментально измеренные значения константы Гамакера для различных материалов по порядку величины совпадают с выписанной оценкой [17]: Aэксп ~ (0,4ё4)×10-19 Дж.
Проводя оценки для типичных условий АСМ-эксперимента в режиме контакта, получаем для величины ван-дер-ваальсового притяжения: FВдВ ~ 10-8ё10-9 Н.
Стоит отметить, что предположение об аддитивности дисперсионного взаимодействия, сделанное Гамакером при выводе формулы (1.5), вообще говоря, не обосновано. Другие существующие теории (например, подход Лифшица [18], связывающий интенсивность дисперсионного взаимодействия с диэлектрическими проницаемостями материалов взаимодействующих тел и среды исследования) позволяют объяснить экспериментально наблюдаемые в ряде случаев силы дисперсионного отталкивания [19]. Однако, несмотря на то, что природа дисперсионного взаимодействия достаточно понятна, разработать точный подход к описанию явления оказалось трудно, и поэтому современные теории являются приблизительными или модельными; вследствие этого совпадение в реальном исследовании расчетных и экспериментальных данных по порядку величины считается вполне удовлетворительным [20].
Ввиду наличия адсорбированной пленки воды на исследуемой поверхности (в случае ее достаточной гидрофильности), при проведении АСМ-экспериментов на воздухе между зондом и образцом формируется мениск, что приводит к возникновению дополнительной силы притяжения между контактирующими поверхностями [21]:
| (1.8) |
Приведенные значения позволяют по порядку величины оценить величину капиллярных сил в режиме контакта АСМ-исследований: Fкап ~ 10-8 Н.
Сущность этого эффекта - в возникновении интенсивных сил притяжения между двумя гидрофобными поверхностями, находящимися в водной среде. В настоящее время считается, что этот эффект носит сложный характер и при различных условиях может быть обусловлен различными механизмами, проявляющимися, тем не менее, одинаково. Согласно имеющимся представлениям, вклад в эффект могут давать энтропийные процессы, связанные со структурным упорядочиванием молекул воды вблизи гидрофобной поверхности [22], термодинамические процессы, связанные с возрастанием роли субкритических флуктуаций в зазоре [23] и пр.
Деление АСМ по способу измерения и фиксации силового взаимодействия зонда и образца позволяет выделить два основных случая: контактная атомно-силовая микроскопия и АСМ прерывистого контакта.
Для измерения величины силового взаимодействия в контактном режиме используется следующая схема, включающая в качестве миниатюрного динамометра упругую консоль (называемую левером или кантилевером), имеющую на свободном конце зонд (другой конец левера заделан в держателе). При сканировании баланс сил взаимодействия зонда и образца приводит к изгибу левера (т.е. сумма всех сил уравновешивается упругой силой изогнутого левера, см. рис. 1.1б); величина изгиба детектируется прецизионным датчиком. В большинстве атомно-силовых микроскопов для этого используют оптические датчики, реализованные по следующей схеме: луч лазерного диода падает под углом на поверхность левера и отражается в центр четырехсекционного фотодиода (рис. 1.2). При изгибе левера в нормальном направлении или при его кручении возникает разница в сигналах соответствующих участков фотодиода: верхние сегменты/нижние сегменты или правые сегменты/левые сегменты. Первый сигнал несет информацию о балансе сил притяжения и отталкивания, а второй - о латеральных силах взаимодействия зонда и образца (рис. 1.3).
|
|
В процессе сканирования система обратной связи поддерживает на заданном уровне величину изгиба кантилевера (следовательно, и силы воздействия зонда на образец) посредством вариации Z-координаты точки закрепления кантилевера. Сигнал обратной связи несет, таким образом, информацию о топографии поверхности Z|F=const(X,Y).
Упругая сила изгиба кантилевера, действующая на зонд, может быть направлена как в сторону образца, так и в обратную (прямой и обратный изгиб кантилевера, см. рис. 1.1б); в первом случае она увеличивает давление зонда на образец, во втором уменьшает. Как правило, при сканировании стремятся уменьшить воздействие на образец, для чего выбирают минимальную величину прямого изгиба кантилевера, или, по мере возможности, максимальную величину обратного изгиба кантилевера, при которой еще сохраняется механический контакт. Сканирование при обратном изгибе может быть нестабильным. Если силы притяжения (капиллярные, дисперсионные) действуют на зонд неодинаково на всем участке сканирования, то в тех местах, где они меньше, зонд может ``оторваться'' от поверхности (выйти из контакта), если величина упругих сил обратного изгиба превысит силы притяжения. Это обстоятельство является основным препятствием при минимизации силы воздействия зонда.
Разница сигналов правых и левых сегментов фотодиода отображает величину сил трения, действующих на зонд при сканировании, что позволяет исследовать распределение локальных фрикционных свойств поверхности. Информацию о градиенте к исследуемой поверхности несет сигнал отклонений Fоткл (X,Y) детектируемый при сканировании как разностный сигнал верхних и нижних сегментов фотодиода, см. рис. 1.3. Оказывается, что в эксперименте зависимости Fтр(X,Y) и Fоткл(X,Y) часто характеризуются большей латеральной разрешающей способностью, чем топографический сигнал Z|F=const(X,Y), в силу чего оказывается возможным детектирование более мелких деталей поверхности.
Некоторые ограничения. Используемая схема измерения силового взаимодействия в АСМ проста и удобна, но в некоторых случаях силы трения между зондом и образцом могут искажать ``топографический'' сигнал, см. рис. 1.4.
|
В случае, когда направление сканирования совпадает с осью левера, карта поверхностного распределения сил трения будет напрямую накладываться на карту измеряемой ``топографии'' поверхности, поскольку действие сил трения будет варьировать разностный сигнал верхних и нижних сегмента фотодиода (именно этот сигнал фиксируется системой обратной связи).
В случае, когда направление сканирования перпендикулярно оси левера, действие сил трения сведется к вариации крутильного изгиба левера и проявится в разностном сигнале правых и левых сегментов фотодиоа, что позволяет различать вклад нормальных и латеральных сил. Однако в реальности и в этом случае фрикционный сигнал может накладываться на топографический, что может быть обусловлено асимметрией фокусировки лазерного луча относительно оси левера или асимметрией ориентации левера (и зонда) относительно подложки. Эти артефакты могут искажать результаты АСМ-измерения высот объектов. Отследить их возникновение можно, анализируя зависимость измеряемых высот от направления сканирования.
Разрешающая способность АСМ.
При сканировании обратная связь фиксирует разностный сигнал верхних и нижних сегментов фотодиода, нормированный на величину суммарного сигнала всех сегментов фотодиода. Это исключает влияние шумов лазерного диода на точность измерения изгиба кантилевера. Влияние сейсмических шумов в достаточной степени исключается использованием простейших антисейсмических фильтров: например, демпфирующей каучуковой прокладкой под гранитным основанием, на котором устанавливается прибор. Поэтому разрешающая способность атомно-силового микроскопа по нормали (в направлении Z) ограничена другими шумами: пьезоманипулятора, кантилевера и электронного блока (предусилителя, цепи обратной связи и высоковольтных усилителей, задающих сигналы на электродах пьезоманипулятора, см. рис. 1.2).
Критерием разрешающей способности по нормали может служить минимальное изменение Z-координаты иглы при сканировании, детектируемое на уровне шумов. Последний существенно зависит от параметров сканирования (скорости, параметров пропорционального и интегрального звеньев цепи обратной связи, размера кадра), а также от вязкоупругих свойств исследуемого образца. Обычно предел разрешения по нормали составляет доли- единицы ангстрем (в зависимости от параметров эксперимента).
Процедура определения разрешающей способности в латеральном направлении не устоялась. Представляется возможным определить ее следующим образом (рис. 1.5).
Пусть зондирующее острие характеризуется радиусом кривизны R, а разрешаемые особенности поверхности - r (рис. 1.5). Тогда возможность латерального разрешения поверхностных особенностей будет связана с пределом разрешения по нормали Dz: критерием разрешения является условие возможности детектирования разницы в значениях вертикальной координаты иглы над объектами и между ними. Геометрический анализ рис. 1.5 позволяет получить соотношение для минимального расстояния между разрешаемыми поверхностными особенностями, при котором ``провал'' между ними на АСМ-изображении еще может быть детектирован (т.е., когда он равен пределу Dz):
| (1.9) |
|
Поскольку достижимое пространственное разрешение должно являться инвариантной характеристикой прибора (не зависящей от объекта исследования), то его следует определить, рассматривая условие детектирования двух точечных объектов (r=0). Тогда соотношение (1.9) примет вид:
| (1.10) |
Стоит отметить, что введенная процедура определения латерального пространственного разрешения упрощена и не учитывает, например, влияния зонда на структуру объекта (за счет контактных деформаций). Введенная процедура, по-видимому, неприменима при определении разрешающей способности в исследованиях молекулярной (атомной) структуры поверхности (см. раздел 2.1.5).
Отдельно следует подчеркнуть отличие предложенного подхода от процедуры определения разрешающей способности оптических приборов, когда используют критерий Релея, соответствующий тому, что освещенность между изображениями детектируемых точек составляет 74% максимальной. То есть для оптического прибора берут в расчет относительную величину провала между изображениями объектов. В случае АСМ важна абсолютная глубина провала - она должна быть детектируемой на уровне шумов. Это различие является следствием того, что оптические изображения формируются путем сложения интенсивностей изображений отдельных объектов (принцип и), напротив, АСМ-изображение формируется путем исключения вклада в изображение более ``низких'' поверхностных особенностей (принцип или).
Для измерения и фиксации при сканировании интенсивности силового взаимодействия зонда и образца в АСМ прерывистого контакта (tapping mode) используется резонансная схема. Дополнительный пьезоэлемент возбуждает вынужденные колебания левера на его резонансной частоте (вдали от поверхности образца). При сближении зонда и образца возникновение дополнительного градиента сил их взаимодействия приводит к сдвигу резонансной частоты (изменению эффективной жесткости) и частичному выходу системы из резонанса. Наряду с этим, при соударениях зонда и образца увеличивается демпфирование колебаний за счет неупругих процессов. Следствием обоих механизмов является уменьшение амплитуды колебаний.
При сканировании АСМ в режиме прерывистого контакта система обратной связи поддерживает на заданном уровне именно величину амплитуды колебаний: Dz=const. В силу высокой чувствительности амплитуды колебаний к среднему значению расстояния между зондом и образцом, можно получать информацию о топографии поверхности (Z|Dz=const(X,Y)) с достаточно высоким пространственным разрешением.
Информация о тонкой структуре (и локальных вязкоупругих свойствах) исследуемой поверхности может быть получена из измерений зависимости: Dj|Dz=const(X,Y), где Dj - сдвиг фаз между колебаниями левера и внешней вынуждающей силы. Вдали от поверхности колебательная система настраивается в резонанс (j = p/2), однако при сближении зонда и образца она, частично, выходит из резонанса и вклад в сдвиг фаз будут давать упругие (изменение резонансной частоты) и диссипативные (увеличение декремента затухания) механизмы. Оказывается, что в ряде случаев сигнал Dj|Dz=const(X,Y) характеризуется большей латеральной разрешающей способностью, чем топографический Z|Dz=const(X,Y), позволяя разрешить более мелкие детали поверхности.
Стоит отметить, что в настоящее время не существует законченной теории АСМ прерывистого контакта, которая позволяла бы количественно связать параметры эксперимента (величину амплитуды и сдвига фаз колебаний левера) с интенсивностью силового воздействия зонда на образец и с локальными вязкоупругими свойствами образца. Это обстоятельство осложняет количественную интерпретацию фазовых АСМ-изображений (Dj|Dz=const(X,Y)) микроскопии прерывистого контакта.
Метод модуляции силы рассмотрим применительно к атомно-силовой микроскопии контакта. В этом случае общая схема измерений такова. Как и в микроскопии прерывистого контакта в экспериментальную схему введен дополнительный пьезоэлемент (биморф), который возбуждает колебания левера, но в этом случае не на его резонансной частоте, а на резонансной частоте самого биморфа (существенно более массивного). Данное обстоятельство приводит к тому, что, в отличие от АСМ прерывистого контакта, в этом случае силовое взаимодействие зонда и образца не влияет на собственную резонансную частоту системы (система не выходит из резонанса в случае, когда проявляется взаимодействие зонда и образца).
Как и в контактной АСМ в процессе сканирования система обратной связи поддерживает на заданном уровне изгиб кантилевера. Но в этом случае фиксируется среднее за период значение изгиба, поскольку кантилевер совершает вынужденные колебания. Величина амплитуды колебаний будет зависеть от упругих свойств поверхности: более жесткие участки поверхности будут ``продавливаться'' в меньшей степени и там амплитуда колебаний будет меньше.
Как и для микроскопии прерывистого контакта в настоящее время не существует удовлетворительной теории, позволяющей проводить количественный анализ упругих свойств поверхностей на основании анализа АСМ-изображений, полученных в режиме модуляции силы.
Поэтому в литературе по АСМ модуляции силы при интерпретации экспериментальных результатов ограничиваются лишь качественным анализом, привлекая некоторые модельные представления.
Несмотря на возможность достижения высокого пространственного разрешения, информация, получаемая методами зондовой микроскопии (в частности - АСМ), может неадекватно отображать реальные особенности поверхности, что является следствием влияния инструмента исследования на объект и приводит к наблюдению артефактов. Эти артефакты, как правило, легко учитываются на качественном уровне при интерпретации АСМ-результатов, однако специфика ряда задач может потребовать количественных оценок и методов восстановления реальной геометрии объектов.
Ниже проанализированы два основных артефакта АСМ, влияние которых существенно при проведении исследований отдельных микрообъектов, адсорбированных на поверхность твердой подложки: эффекта уширения профиля и эффекта занижения высот АСМ-изображения объектов исследования. Построены количественные методики учета влияния рассматриваемых эффектов на результаты исследования АСМ. В свете результатов теории контактных деформаций рассмотрен механизм визуализации атомной (или молекулярной) структуры поверхности при исследованиях АСМ.
С первых работ по АСМ-визуализации молекул нуклеиновых кислот [6,24] отмечалось, что высоты АСМ-изображений ДНК существенно занижены в сравнении с модельными представлениями о структуре молекулы. В то же время, для ряда других объектов (с близкими физическими свойствами, но отличными геометрическими размерами) эффект занижения высот проявляется не столь выраженно. Так было обнаружено (см. раздел #.#), что эффект занижения высот для вирусных частиц несущественен (при минимизации силы воздействия зонда), в то время, как высота АСМ-изображений молекул нуклеиновых кислот в тех же условиях эксперимента занижена более чем на 50%, несмотря на то, что и те и другие объекты визуализированы на одном кадре. Применение излагаемой ниже методики позволило объяснить данную закономерность и связать ее с различием радиусов частиц ВТМ ( ~ 10 нм) и нуклеиновых кислот ( Ј 1 нм).
Следуя [25] предположим, что эффект занижения высот АСМ-изображений объектов связан с контактными деформациями. Действительно, в процессе сканирования, как в режиме контакта, так и прерывистого контакта, зонд воздействует на образец с некоторой силой (см. раздел 1.3), величина которой обычно лежит в диапазоне (1ё100)×10-9 Н. Действие этой силы, в связи с чрезвычайно малым радиусом кривизны зондирующего острия (обычно около 10 нм), приводит к возникновению значительного контактного давления, которое должно вызывать контактные деформации.
Впервые задача о контактных деформациях двух тел была рассмотрена Г. Герцем в 1882 г. [26]. Остановимся на основных соотношениях решения контактной задачи Герца [27]. Рассмотрим два тела, которые соприкасаются друг с другом в некоторой точке их поверхностей, см. рис. 2.1 а, на рисунке изображен разрез соприкасающихся поверхностей, O - точка контакта.
|
Вблизи точки касания O уравнения поверхностей могут быть записаны в виде:
| (2.1) |
Если теперь эти два тела сдавливаются некоторой силой F, то они будут деформироваться и сблизятся на некоторое расстояние h (рис. 2.1 б), при этом областью соприкосновения будет уже не одна точка, а некоторый участок конечной площади S.
Дальнейший анализ, проведенный Герцем, включает рассмотрение тензора cab + cўab, главные значения которого A и B могут быть выражены через R1, R2, Rў1, Rў2, соответствующие формулы для общего случая приведены в [27]:
| (2.2) |
Известные соотношения Герца показывают, что формой области контакта является эллипс с полуосями a и b, причем (при условии малости деформаций в сравнении с соответствующими радиусами кривизны):
| (2.3) |
| (2.4) |
Воспроизведем, также, формулу, описывающую распределения давления в области контакта:
| (2.5) |
Соотношения Герца (2.3) связывают искомые параметры задачи (полуоси a, b эллиптической области контакта и величину сближения h) с известными параметрами (сдавливающей силой F, модулями Юнга зонда и образца, параметрами A и B) через интегральные зависимости, сводимые к эллиптическим интегралам. Однако в силу того, что (2.3) являются системой нелинейных уравнений с неявными зависимостями от искомых параметров a и b, то, для возможности их применения при интерпретации экспериментальных результатов, необходимы либо реализация общего численного решения, либо дополнительный анализ с привлечением упрощающих предпосылок.
Известно, что соотношения Герца (2.3) легко упрощаются в случае, когда контактирующие тела имеют сферическую геометрию (рассмотрение этого случая входит в стандартный курс теории упругости, см., например, [27]).
Такая модель геометрии контакта может найти широкое применение в задачах, связанных с интерпретацией результатов СЗМ - при рассмотрении контактных деформаций, возникающих в процессе сканирования микрообъектов, форма которых может быть аппроксимирована сферой (например, молекул ряда белков и пр.), а также плоских образцов, например, тонких пленок.
Воспроизведем известные формулы [27] и проведем оценки. Если зонд и образец вблизи точки контакта описываются сферическими поверхностями и характеризуются радиусами кривизны R и Rў, то, согласно (2.2),
|
| (2.6) |
Для величины h - сближения зонда и образца за счет контактных деформаций - в этом случае справедлива формула:
| (2.7) |
И приведем формулу для вычисления давления на образец:
| (2.8) |
Рассмотрим контакт кремниевого зонда (E = 1,5×1011 Па) радиусом кривизны R = 10 нм (типичное значение, см. таблицу A.1) c плоским образцом, и проведем оценки для двух значений величины сдавливающей силы: F = 5×10-9 Н и F = 5×10-8 Н (таблица 2.1).
| Модуль упругости образца, Па | a, нм - радиус области контакта | h, нм - сближение за счет деформации | P, ГПа - контактное давление | |||
| 108 | 7,2 | 16 | 5,2 | 24 | 0,03 | 0,07 |
| 109 | 3,4 | 7,2 | 1,1 | 5,2 | 0,14 | 0,3 |
| 1010 | 1,6 | 3,4 | 0,25 | 1,1 | 0,63 | 1,4 |
| 1011 | 0,9 | 1,8 | 0,07 | 0,3 | 2,2 | 4,7 |
| 1012 | 0,7 | 1,4 | 0,04 | 0,2 | 3,7 | 7,9 |
| при величине сближающей силы (нН): | ||||||
| 5 | 50 | 5 | 50 | 5 | 50 | |
Таблица перекрывает диапазон значений модулей упругости образцов от 108 Па (значение модуля упругости пенопласта) до 1012 Па (значение модуля упругости алмаза). Для многих материалов значения модуля Юнга лежат в диапазоне 1010ё1011 Па; для биополимеров - как правило, в диапазоне 109ё1010 Па. Один из существенных выводов анализа таблицы тот, что величина контактного давления составляет значительную величину. Из анализа таблицы можно предположить, например, что АСМ-исследования очень твердых материалов (типа алмаза) при использовании обычных кремниевых зондов могут приводить к разрушению последних (предел прочности кремния: sв = 0,7×109 Па), если не уделять внимание минимизации силы взаимодействия зонда и образца.
Тот результат, что для более жестких образцов выше значение контактного давления при АСМ-исследованиях, служит объяснением следующей экспериментально наблюдаемой закономерности. Поверхность слюды можно локально разрушить при сканировании участка небольшой площади (100×100 нм2), если увеличить силу воздействия зонда до величины ~ 10-7 нН. В то же время, в тождественных условиях эксперимента поверхность пирографита разрушить не удается. Это объясняется меньшим значением контактного давления во втором случае в силу меньшей жесткости пирографита (значение микротвердости пирографита Hm ~ 1010 Па, слюды Hm ~ 2×1011 Па).
С другой стороны, согласно таблице 2.1, типичные значения контактного давления в АСМ-эксперименте часто превышают пределы прочности исследуемых образцов и при меньших силах воздействия зонда (пределы прочности (по сжатию) слюды и графита составляют sв.сж @ 0,5×109 Па и sв.сж @ 0,03×109 Па соответственно [28]) .
В чем же тогда причина возможности проведения методом АСМ неразрушающих исследований широкого спектра материалов?
Вот аргументы, объясняющие возможность проведения неразрушающих исследований методом АСМ:
Действительно, во-первых, значения пределов прочности определяют приложением разрушающего давления к некоторой поверхности образца в заданном направлении (одном). В нашем случае мы имеем дело с приложением к образцу локального давления, которое перераспределяется по трем направлениям.
Во-вторых, при сканировании зонд оказывает воздействие на локальный участок образца в течение промежутка времени t ~ a/Vскан ~ a/Lf, где a - латеральный размер области контакта (2.6), L - длина скана (строки сканирования), f - частота строчной развертки, Vскан - скорость сканирования. Приведем оценку границ диапазона характерного времени взаимодействия. Согласно таблице 2.1, типичные значения a ~ 1 нм. Для частоты сканирования 10 Гц при размере кадра 15 мкм имеем для времени взаимодействия оценку t ~ 10-5 сек, а при размере кадра 100 нм - t ~ 10-3 сек. Полученные оценки и определяют границы диапазона типичных значений времен взаимодействия зонда и локального участка образца при сканировании.
Поскольку известен экспериментальный факт, что в результате замедления скорости сканирования (увеличения t от значения 10-5 сек до 10-3 сек при достаточной величине силы воздействия зонда), ряд исследуемых поверхностей может разрушаться, то можно предположить, что характерные времена процессов разрушения этих поверхностей под локальным воздействием зонда попадают в указанный диапазон.
Эффект разрушения исследуемых поверхностей при замедлении скорости сканирования.
Замедление скорости сканирования (при фиксированной величине воздействующей силы) может приводить к разрушению исследуемой поверхности. Например, уменьшение размера кадра (при той же частоте строчной развертки приводит к уменьшению скорости сканирования (перемещения зонда по поверхности) и может вызывать разрушение поверхности, успешно сканируемой при больших размерах кадра при том же значении силы воздействия зонда.
На этом принципе основана методика формирования в тонких органических пленках искусственных дефектов: участок поверхности заданной площади сканируют при медленной скорости, что приводит к локальному разрушению пленки зондом и удалению ее материала с этого участка; затем, при сканировании кадра большего размера (при увеличенной скорости сканирования), можно визуализировать искусственный дефект в пленке, размеры и форма которого совпадают с участком предварительного сканирования (см. рис. #.#). С другой стороны, стоит отметить, что именно разрушение поверхности при уменьшении размера кадра (замедлении скорости перемещения зонда по поверхности) является основным препятствием при исследованиях молекулярной упаковки тонких пленок, см. раздел #.#.
Можно было бы предположить, что механизм эффекта следующий. При большой скорости сканирования объект (например, тонкая пленка) не ``успевает'' деформироваться и эффективная глубина проникновения зонда меньше, чем определяемая формулой (2.7). При замедлении скорости перемещения зонд глубже ``вязнет'' в образце и, если глубина проникновения h становиться сравнимой с толщиной пленки, то имеет место разрушение.
Однако, по-видимому, это объяснение не может быть принято как универсальное. Действительно, согласно оценками раздела 2.1.4, характерное время установления упругих контактных деформаций составляет величину ~ 10-6 сек, что меньше или много меньше, чем время взаимодействия зонда и локального участка образца (10-3ё10-5 сек, см. выше). Поэтому применение статических формул теории контактных деформаций (типа (2.7)) для анализа результатов АСМ является оправданным, в силу чего глубину проникновения зонда в образец за счет упругих деформаций следует считать не зависящей от скорости сканирования. Т.о. проводимые в разделе 2.1.4 оценки позволяют сделать вывод, что наблюдаемый эффект: разрушения поверхности при замедлении скорости сканирования не связан с динамикой процесса упругих деформаций и должен быть обусловлен более медленными, неупругими процессами. Т.е. разрушение поверхности имеет место в случае, когда характерное время взаимодействия зонда и локального участка образца становиться сравнимым со временами неупругих процессов, связанных с локальным воздействием зонда (при достаточной величине силы воздействия).
Модель цилиндрического образца может найти применение при анализе деформаций микрочастиц цилиндрической формы (вирусных частиц, линейных макромолекул и пр.). Однако в этом случае (контакт сферического зонда с боковой поверхностью цилиндра) соотношения Герца (2.3) не упрощаются. Ниже изложена реализация общего численного решения системы (2.3), а также проанализированы два частных случая (близких и различающихся главных значений суммарного тензора кривизны контактирующих поверхностей), для которых можно получить аналитические формулы, выражающие искомые величины явно через известные параметры задачи. Из формул (2.3) следует:
| (2.9) |
Соотношения (2.3) являются системой нелинейных уравнений, где искомые величины выражены неявно через эллиптические интегралы. Это обстоятельство осложняет реализацию численного решения, основанного непосредственно на (2.3). Поэтому проведем дополнительные аналитические преобразования, основываясь на соотношениях (2.9).
Воспользовавшись формулой [29]:
|
| (2.10) |
Соотношение (2.10) является нелинейным уравнением с одним неизвестным - отношением a/b, что позволяет реализовать его решение. Далее, из (2.9) получаем зависимость:
| (2.11) |
Таким образом мы свели систему нелинейных уравнений к независимым уравнениям: из соотношения (2.10) можно численно определить a/b, затем, из соотношения (2.11), значение b. Воспользовавшись первым из уравнений (2.9) определяем h. Так получаем все искомые параметры: h, a и b, т.е. задача решена численно в общем виде без использования упрощающих предположений. После этого давление (среднее) в области контакта также можно определить: P=F/pab. Текст программы (написанной на языке C++), реализующей данное численное решение, приведен в Приложении A.1.
Реализованное решение справедливо для произвольной геометрии зонда и образца. Необходимые для решения значения A и B определяются именно этой геометрией: для случая контакта сферы радиуса R и боковой поверхности цилиндра радиуса Rў они выражаются из соотношений (2.2) следующим образом:
| (2.12) |
Рассмотрим теперь дополнительные упрощающие предположения частных случаев.
Случай различающихся главных значений суммарного тензора кривизны контактирующих поверхностей.
В случае контакта зонда и боковой поверхности цилиндра, при условии, что радиус цилиндра меньше радиуса зонда, из формулы (2.12) следует, что главные значения суммарного тензора кривизны поверхностей различаются: A > B. Из формулы (2.10) (или непосредственно из формул (2.3)) следует, что в этом случае a < b. Если различие составляет достаточную величину, то можно воспользоваться асимптотикой полного эллиптического интеграла, справедливой при условии a2 << b2, что, очевидно, не является жестким условием [29]:
| (2.13) |
| (2.14) |
|
| (2.15) |
Формулы для параметров эллиптической области контакта a и b несколько громоздки:
| (2.16) |
| (2.17) |
| (2.18) |
Таким образом, полученные нами формулы (2.17), (2.16) и (2.18) решают поставленную задачу. Действительно, искомые параметры выражены явно через известные величины (F, D, A, B) и параметр C, который можно определить из соотношения (2.15) или воспользоваться оценкой.
Для удобства сравнения результатов точного решения (по соотношениям (2.10), (2.11) и первым из (2.9)) и приближенного (по (2.17), (2.16) и (2.18)), последнее также включено в программу решения задачи о контактных деформациях, см. A.1.
Случай близких главных значений суммарного тензора кривизны контактирующих поверхностей.
Случай близких значений величин A и B реализуется для задачи контакта сферического зонда и боковой поверхности цилиндра при условии, что радиус цилиндра много больше радиуса зонда. Тогда, в силу соотношений (2.12), действительно A ~ B и, в силу (2.10) (или непосредственно (2.3)), имеем: a ~ b. В этом случае асимптотика (2.13) теряет применимость.
При выполнении условия a ~ b следует воспользоваться другой асимптотикой полного эллиптического интеграла [29]:
|
В этом случае для параметров области контакта a и b с привлечением соотношений (2.12) и (2.9) можно вывести следующие зависимости:
| (2.19) |
| (2.20) |
Для сближения зонда и образца за счет деформации получим:
| (2.21) |
И для величины давления на образец имеем выражение:
| (2.22) |
Итак, и для рассматриваемого случая получены аналитические формулы (2.21, 2.20), решающие задачу. Для удобства сравнительного анализа с точным численным решением они также добавлены в текст программы A.1.
Выше мы рассмотрели контактные деформации в области соприкосновения зонда и образца. Однако общая деформация, определяющая занижение высоты АСМ-профиля, включает еще и вклад деформаций в области контакта образца и подложки (имеется в виду случай, когда сверху на образец давит зонд). Для этого случая остаются справедливыми приведенные выше решения, нужно лишь соответствующим образом переопределить параметры A и B.
Геометрия контакта образца радиуса Rў (на который сверху давит зонд радиуса R - образец следует рассматривать в этом случае как изогнутый цилиндр с радиусом изгиба поверхности, контактирующей с подложкой: R + 2Rў) и плоской подложки позволяет определить значения A и B по формулам (2.2):
| (2.23) |
Алгоритм анализа этого случая идейно не отличается от проведенного выше для значений A и B, определяемых формулой (2.12), его результаты вошли в таблицу 2.2.
Вообще, вклад в формулу для занижения высот АСМ-профиля объектов исследования за счет контактных деформаций при сканировании дают три слагаемых:
| (2.24) |
Однако при анализе ситуации с ``мягкой'' подложкой третье слагаемое формулы (2.24) следует учитывать. Так, из таблиц 2.1 и 2.2 следует, что занижение высот цилиндрического образца (радиус 1 нм, модуль Юнга 1010 Па, сила воздействия зонда 5 нН) в случае слюдяной подложки (E ~ 1011 Па) будет в ~ 1,4 раза больше, чем в случае пирографитовой (E ~ 1010 Па) подложки. Этот вывод согласуется с экспериментом: действительно, при использовании в качестве подложки слюды занижение высот АСМ-изображений молекул нуклеиновых кислот больше, чем при использовании пирографитовой подложки.
В качестве иллюстрации применим рассмотренный алгоритм для вычисления контактных деформаций в модельных случаях цилиндрического образца с радиусом 1 нм и радиусом 10 нм и сферического образца с теми же значениями радиуса. Результаты приведены в таблице 2.2, где для удобства сравнительного анализа для всех случаев используются одинаковые параметры: значения модулей Юнга образцов (Eў1 = Eў2 = 1010 Па), зонда (E = 1011 Па), силы воздействия зонда F = 5×10-9 Н и радиуса кривизны кончика зонда R = 10 нм. Выбор значений модулей Юнга образов (10 ГПа) обусловлен тем, что это значение является верхней границей модулей упругости биополимеров. Поэтому значения, приведенные в таблице, должны рассматриваться в смысле ``как минимум'' при АСМ-исследованиях биообъектов; в таком случае из анализа таблицы следует вывод, что роль контактных деформаций весьма значительна и должна учитываться при интерпретации результатов подобных экспериментов.
| Rў, нм | Область контакта | a и b, нм | P, Па | h, нм | e, % |
| сферический образец | |||||
| 1 нм | зонд/образец | 0,7 нм | 3×109 Па | 0,57 нм | 29% |
| образец/подложка | 0,7 нм | 3×109 Па | 0,55 нм | 28% | |
| суммарная деформация: | 1,12 нм | 56% | |||
| 10 нм | зонд/образец | 1,3 нм | 1×109 Па | 0,32 нм | 1,6% |
| образец/подложка | 1,6 нм | 0,6×109 Па | 0,26 нм | 1,3% | |
| суммарная деформация: | 0,58 нм | 2,9% | |||
| цилиндрический образец | |||||
| 1 нм | зонд/образец | 0,46 и 2,2 нм | 1,6×109 Па | 0,36 нм | 18% |
| образец/подложка | 0,47 и 2,4 нм | 1,5×109 Па | 0,34 нм | 17% | |
| суммарная деформация: | 0,7 нм | 35% | |||
| 10 нм | зонд/образец | 1,1 и 1,8 нм | 0,8×109 Па | 0,29 нм | 1,4% |
| образец/подложка | 1,3 и 2,7 нм | 0,4×109 Па | 0,21 нм | 1% | |
| суммарная деформация: | 0,5 нм | 2,5% | |||
В таблице для цилиндрического образца приведены результаты численных расчетов точной методики, реализованной по соотношениям (2.9), (2.10) и (2.11). Расчеты по приближенным методикам дают незначительные различия с точным решением: для случая Rў = 1 нм решение по формулам (2.17), (2.16) дает отличие в значениях a и b около 2%, и в значении h - 0,5%; для случая Rў = 10 нм решение по формулам (2.21), (2.20) дает отличие от точного решения для a и b около 10%, для h около1%.
Из таблицы следует, что при прочих равных условиях относительные деформации объектов с меньшим радиусом кривизны существенно выше. Это подтверждается экспериментом: так относительные деформации молекул нуклеиновых кислот (радиус кривизны около 1 нм) превышают относительные деформации вирусных частиц табачной мозаики, даже в том случае, когда объекты визуализованы на одном кадре (что определяет абсолютную тождественность условий эксперимента).
Итак, применив теорию контактных деформаций, можно объяснить основные закономерности эффекта занижения высот АСМ-изображений при проведении АСМ-исследований.
Можно также показать, что зависимость величины деформации от параметров задачи имеет в общем случае (см. формулы (2.7), (2.17) и (2.21)) вид:
| (2.25) |
С целью экспериментальной иллюстрации закона h ~ F2/3 ниже приводятся результаты исследования тест-объектов - вирусных частиц табачной мозаики и молекул ДНК (имеющих цилиндрическую форму) - при различных значениях нагружающей силы при сканировании.
Для вирусных частиц табачной мозаики наблюдается хорошее совпадение эксперимента с теорией (т.е. с законом ``две третьих'' (2.25)), см. рис. 2.2
|
Экспериментальную зависимость измеряли путем анализа высот АСМ-изображений вирусных частиц, полученных при различной величине силы воздействия зонда при сканировании. Теоретическая зависимость рассчитана по изложенной выше методике (точное решение), где использовались значения радиуса зонда R = 25 нм (значение определено из эксперимента для конкретного зонда) и модуля упругости объекта Eў = 4×109 Па (значение определено аппроксимацией экспериментальных точек).
Можно предложить методику измерения модуля упругости отдельного микрообъекта, адсорбированного на поверхность твердой подложки. Для этого необходимо измерить высоту АСМ-профиля объекта при различных значениях силы воздействия зонда при сканировании, а затем, из аппроксимирующей зависимости (закона ``две третьих''), определить искомое значение D (связанное с модулем упругости объекта по (2.4)). Использование данной процедуры для определения модуля Юнга отдельных частиц ВТМ показало, что определяемые значения лежат в диапазоне 3ё4 ×109 Па. Эта методика определения упругих параметров адсорбированных объектов может успешно применяться в случае, если относительные деформации объектов невелики (иначе теряет применимость теория контактных деформаций).
Погрешности методики связаны с погрешностью калибровки сканера, погрешностью определения параметра геометрии иглы (R), определения уровня ``нулевого'' изгиба кантилевера (минимального воздействия зонда) и определения жесткости кантилевера фирмой-производителем (что приводит к погрешностям в определении значений силы воздействия зонда). Однако потенциально жесткость кантилевера можно определять с большей точностью, используя калибровку по резонансной частоте колебаний. Это может повысить точность определения упругих параметров отдельных микрообъектов до уровня, определяемого величиной набранной статистики высот объектов и дисперсией этих значений.
Из рис. 2.2 следует, что закон ``две третьих'' (2.25) справедлив для исследуемого случая в широком диапазоне сил, за исключением области минимальных воздействий. Это связано со следующим: за нулевое значение в эксперименте выбирали минимально возможное значение нагружающей силы, при котором удавалось осуществлять сканирование. Однако в силу того, что данный эксперимент проводили в естественной атмосфере, наличие капиллярных сил (капиллярного мостика), очевидно, не позволяло минимизировать силу воздействия до величины, меньшей, чем несколько наноньютонов.
Для анализа контактных деформаций молекул нуклеиновых кислот проводили сходный эксперимент, соответствующая экспериментальная зависимость изображена на рис. 2.3.
|
Однако в рассматриваемом случае деформация молекул ДНК уже не описывается законом ``две третьих'' (2.25). Вместо этого наблюдаем обычную линейную зависимость, т.е. закон Гука. Но это и естественно, поскольку теория контактных деформаций справедлива при условии малости деформаций объекта в сравнении с его радиусом кривизны. Последнее не выполняется для случая АСМ-исследований молекул ДНК, поскольку их относительные деформации велики в стандартных экспериментальных условиях, см. таблицу 2.2. Кроме того, вообще применимость континуальной теории и использование макроскопических параметров (типа модуля Юнга) для описания деформации отдельной молекулы ДНК, вызывает сомнения. Тем не менее, смысл проведенного анализа в том, что он позволяет качественно объяснить, почему относительные деформации под воздействием зонда тем выше, чем меньше радиус кривизны объектов, см. таблицу 2.2.
То, что для случая молекул ДНК экспериментально измеренные относительные деформации велики даже при малых силах воздействия зонда, объясняется, опять же, присутствием капиллярных сил (капиллярного мостика), не позволяющих минимизировать силу воздействия зонда на образец при сканировании на воздухе до значений меньших, чем несколько наноньютонов; из-за малости радиуса кривизны молекулы ДНК этого значения силы уже достаточно для того, чтобы значения относительной деформации были велики, см. таблицу 2.2.
Покажем, что характерное время установления контактных деформаций меньше типичных значений времени взаимодействия зонда и локального участка образца при сканировании. Этим обоснуем применимость статических формул для контактных деформаций в задачах, связанных с АСМ-исследованиями.
Рассмотрим контакт зонда и плоского образца. При приложении силы F в статическом случае сближение за счет деформации будет определяться формулой (2.7). Однако при мгновенном приложении силы к касающимся телам это значение h будет достигнуто не сразу, а в результате переходного процесса динамического изменения h во времени. Уравнение, описывающее рассматриваемый переходный процесс для h(t), может быть получено из элементарных рассмотрений баланса сил взаимодействия (прилагаемой извне F и обусловленной упругим откликом ЦRh3/2/D, см. (2.7)):
| (2.26) |
|
График численного решения уравнения (2.26) приведен на рисунке 2.4. При решении использовали значения таблицы A.1 для оценки масс зондов и кантилеверов (лежат в диапазоне 10-10ё10-11 кг). Для других параметров задачи выбраны следующие типичные значения: F = 5×10-9 Н, D = 10-10 Па-1, R = 10×10-9 нм. Из решения следует, что характерные времена деформации имеют порядок t ~ 10-6 сек (та же оценка может быть получена из соотношения t ~ Ц{mh/F}, которое следует из (2.26), и где h оценивается по (2.7)).
Итак, характерные времена установления контактных деформаций (т.е. характерные времена упругого отклика системы) для случая АСМ меньше или много меньше характерных времен взаимодействия зонда и локального участка образца (10-3ё10-5 сек, см. 2.1.2). За эти времена взаимодействия переходный процесс установления контактных деформаций заведомо закончится, и поэтому использование при анализе задач АСМ формул статической теории контактных деформаций вполне оправдано.
Соотношение, следующее из формулы (2.6):
| (2.27) |
Рассчитанная по формуле (2.27) оценка, что при типичных условиях АСМ-эксперимента a ~ 1 нм (см. также таблицу 2.1), означает, что площадь области контакта pa2 имеет значение S ~ 3 нм2. Если, например, сравнить с типичной величиной площади, приходящейся на одну молекулу в плотноупакованном ЛБ слое (0,2 нм2, см. раздел #.#), то очевидно, что при сканировании в каждый момент времени имеет место контакт зонда не с одной, а с десятком и более молекул. Почему же, в таком случае, АСМ позволяет получать молекулярное (или атомное) разрешение при исследовании широкого спектра поверхностей кристаллических материалов и тонких пленок?
Авторы работы [25] для того, чтобы совместить результаты теории контактных деформаций (значительную величину области контакта) с возможностью наблюдения атомной и молекулярной структуры поверхности методом АСМ прибегают к предположению об игле, имеющей некоторую ``особенность'' ангстремных размеров. Подобное представление, что при визуализации атомной структуры с поверхностью контактирует лишь некоторая ``особенность'' (один крайний атом) зонда, широко распространено в силу своей наглядности (в этом случае говорят об ``истинном'' атомном разрешении АСМ [30]). Однако имеется также представление, что визуализация двумерной периодической структуры возможна и в случае, когда игла контактирует с исследуемой поверхностью несколькими атомами своего кончика [31] (в этом случае говорят о ``ложном'' атомном разрешении).
Анализ влияния геометрии кончика иглы (один или несколько атомов, контактирующих с поверхностью) на формирование АСМ-изображений атомной упаковки исследуемых поверхностей рассматривался в литературе. Например, авторы работ [32,33] методом компьютерного моделирования исследовали ряд моделей: взаимодействие зонда с двумерной периодической структурой (атомной структурой поверхности) в случае, если зонд контактирует с поверхностью одним, тремя, четырьмя и девятью крайними атомами (при различных расстояниях между атомами). Был сделан вывод, что ``истинное'' атомное разрешение возможно лишь при наличии единственного контактирующего с поверхностью атома иглы. Если контактирующих атомов несколько, то было показано, что и в этом случае возможна визуализация двумерной периодической структуры, характеризующейся теми же параметрами элементарной ячейки, что и реальная поверхностная решетка. Однако структура самой ячейки отображается неадекватно. При определенных условиях возможна инверсия контраста, т.е. наблюдение минимумов АСМ-изображения над атомами исследуемой поверхности и максимумов между ними. Точечный дефект (пропуск одного атома решетки) также неадекватно отображается на АСМ-изображении: имеет место перераспределение его вклада по некоторой области, и, при определенных условиях, возможна визуализация ``ложного'' атома на месте дефекта. Т.о. речь идет о достижении ``ложного'' атомного разрешения.
Авторы отмечают корреляцию полученных ими результатов с экспериментальными наблюдениями и делают вывод, что для достижения ``истинного'' атомного разрешения необходимо использовать иглу с единственным атомом на кончике (предлагая методику тестирования геометрии кончика иглы путем исследования точечных дефектов в атомной структуре поверхности тест-объекта).
В то же время, авторы рассматриваемых работ интерпретируют этот параметр - ``количество атомов на кончике иглы'' - как случайный, не допускающий контролируемого изменения со стороны экспериментатора. Напротив, ниже предлагается подход, основанный на результатах теории контактных деформаций, который связывает наблюдаемые экспериментальные особенности АСМ-визуализации атомной (молекулярной) упаковки поверхности с контролируемыми параметрами эксперимента.
Рассмотрим при каких условиях возможно достижение ``истинного'' (используя терминологию авторов [30,31]) атомного (молекулярного) разрешения. Согласно формуле (2.27) размер контактной площадки pa2 будет равен 0,2 нм2 (контакт с единственным атомом при расстоянии между атомами ~ 0,5 нм), при радиусе кривизны зонда 10 нм и достаточно жестком образце (модуль Юнга 1011 Па), лишь при минимизации величины силы воздействия зонда при сканировании до значения 0,1 нН, что требует специальных экспериментальных условий (исследования в жидких средах или в вакууме).
В случае проведения АСМ-исследований на воздухе минимизация силы воздействия на образец возможна, по-видимому, лишь до единиц наноньютонов. Поэтому при исследованиях на воздухе (особенно ``мягких'' образцов, например, тонких пленок ЛБ, см. раздел #.#) получаемая в результате АСМ-исследования двумерная картина является ``ложным'' молекулярным разрешением.
Ниже покажем, что теория контактных деформаций допускает возможность достижения ``ложного'' атомного (молекулярного) разрешения, т.е. визуализации двумерной периодической структуры, характеризующейся теми же параметрами элементарной ячейки, что и решетка исследуемой поверхности.
В силу неоднородного распределения давления в области контакта (см. формулу (2.5)) вклад каждого атома поверхности в силовое взаимодействие зонда и образца будет определяться его положением относительно центра области контакта; количество атомов, дающих вклад во взаимодействие, определяется радиусом области контакта (2.27).
Рассмотрим следующую модель: зонд сканирует поверхность плоского образца (радиус области контакта определяется формулой (2.27)), тогда, согласно формуле (2.5), распределение давления в области контакта неоднородно, что позволяет ввести аппаратную функцию вида:
| (2.28) |
|
Введенная аппаратная функция позволяет связать получаемое АСМ-изображение (учитывая вклад каждого атома в суммарное силовое взаимодействия зонда и образца) f(x,y) с реальной геометрией атомной структуры объекта исследования j(x,y):
| (2.29) |
Физический смысл уравнения (2.29) таков: степень вклада каждого атома в силовое взаимодействие с иглой определяется тем, насколько он далеко находится от центра области контакта (это и описывается аппаратной функцией A(x-xў,y-yў)).
Применим разработанный подход для простейшей модели: вычисления АСМ-изображения в случае, когда атомная геометрия объекта описывается гексагональной решеткой с параметром ячейки d, а в качестве атомных функций взяты d-функции, см. рис. 2.6.
|
Вычислим функцию f(x,y), определяемую (2.29), для двух случаев, изображенных на рис. 2.6:
|
|
Проводя вычисления с использованием (2.28) и (2.29), обозначая для двух случаев вычисляемые функции как f1 и f2, воспользовавшись свойством d-функций, получим (пренебрегая числовыми множителями):
| (2.30) |
| (2.31) |
| (2.32) |
В силу изложенного в разделе 1.3.2 (для разрешающей способности АСМ) отличие АСМ от оптических приборов заключается в том, что для характеристики разрешающей способности и контраста изображений следует использовать абсолютную (а не относительную) разницу между максимумами и минимумами АСМ-изображения. Поэтому мы будем использовать именно разностную функцию D АСМ-изображения, а не функцию видности S (которую традиционно используют для характеристики оптических приборов).
Проведем расчет разностной функции (2.32) для случая d = 0,52 нм (параметр ячейки слюды). Результаты представлены в виде графика на рис. 2.7, где приведены зависимости разностной функции и ее модуля от радиуса области контакта a.
|
Как следует из рисунка, значение разностной функции существенно варьирует в зависимости от параметра a, определяемого соотношением (2.27). Более того, при некоторых значениях a может изменяться знак разностной функции, что должно приводить к инвертированному АСМ-изображению (инверсия контраста). Но особенно следует подчеркнуть, что по мере увеличения a (и вовлечения в контакт все новых атомов) не наблюдается тенденция к снижению максимумов разностной функции, т.е. сохраняется возможность достижения ``атомного'' разрешения. Т.о. ``ложное'' атомное разрешение может быть достигнуто и при значительной величине области контакта a (т.е., например, при ``тупой'' игле, ``мягком'' образце или значительной силе воздействия зонда F).
Эти выводы, несмотря на использование упрощенной модели, качественно согласуются с наблюдаемыми экспериментальными закономерностями. Действительно, контраст и качество АСМ-изображений молекулярной (или атомной) упаковки исследуемой поверхности существенно зависит от величины приложенной силы воздействия зонда F, определяющей, согласно (2.27), величину области контакта a.
Стоит отметить, что, несмотря на искажения реальной картины атомной или молекулярной упаковки при АСМ-визуализации (инверсия контраста, ``потеря'' одного атома в базисе для случая пирографита, различная спектральная плотность сечений вдоль эквивалентных направлений и т.п.), метод АСМ применим для определения параметров решетки поверхности. Действительно, визуализируемая двумерная структура характеризуется теми же векторами трансляции, что и реальная исследуемая поверхность (преобразование (2.29) не может исказить значений пространственных частот двумерной периодической функции исследуемой поверхности).
Важной отличием изложенного подхода в сравнении с описанными в литературе является то, что он позволяет однозначно связать особенности (контраст, качество и пр.) получаемого АСМ-изображения атомной структуры поверхности с реальными параметрами эксперимента (силой воздействия зонда, модулями упругости зонда и образца, радиусом кривизны иглы и степенью ее асимметрии), а не с абстрактным ``количеством атомов на кончике иглы''.
Эффект уширения проявляется в том, что отдельные микрообъекты, адсорбированные на плоскую подложку и визуализированные АСМ, имеют завышенные значения ширины профиля. Этот эффект может быть полезен. Так, например, при АСМ исследованиях нуклеиновых кислот он облегчает идентификацию молекул: ``уширенные'' молекулы (ширина профиля молекулы ДНК завышается в 5-10 раз) легче обнаружить на кадре значительной площади, что облегчает набор статистики. В силу этого, при исследовании нуклеиновых кислот эффект уширения позволяет обходится без дополнительного контрастирования макромолекул (комплексообразованием с белками и пр.).
Эффект уширения связан с тем, что зондирующее острие микроскопа имеет конечный радиус кривизны кончика. Эту аппаратную погрешность трудно преодолеть, поскольку уменьшение радиуса кривизны кончика зонда (использование более острых зондов) приводит к увеличению давления в области контакта (при том же значении величины контактных сил, см. формулу (2.8)); значительная величина контактного давления может привести, в свою очередь, к частичному разрушению зонда при сканировании. Уменьшить контактное давление можно при наблюдении поверхности образцов в жидкостях, поскольку в этом случае можно поддерживать контактные силы на существенно более низком уровне [34].
Подобные эффекты могут весьма существенно (особенно при значительном радиусе кривизны кончика зондирующего острия) искажать морфологию поверхности при ее визуализации методом АСМ. Наглядное сравнение результатов АСМ и электронной микроскопии при исследовании одних и тех же поверхностей проводят авторы работы [35]. Приведенные изображения показывают, что при исследовании поверхностей, характеризующихся сложной морфологией, конечность радиуса кривизны иглы может привести к потере информации на получаемых изображениях АСМ.
При исследованиях биологических и органических объектов часто возникает задача определения влияния эффекта уширения на АСМ-профиль объекта, адсорбированного на поверхность твердой подложки. Искажающее влияние эффекта уширения и контактных деформаций приводит к тому, что для восстановления реальной геометрической формы объекта исследования по его АСМ-изображению необходим дополнительный математический анализ с использованием определенных модельных представлений о геометрии зонда (конус со сферическим кончиком, параболоид и пр.) и априорных представлений о форме объекта исследования.
В работе [36] предложена универсальная компьютерная методика деконволюции АСМ-изображений, включающая два этапа: определение геометрии используемого острия с помощью тест-объектов и свертку инвертированной геометрии острия с измеренным АСМ-профилем; эта процедура позволяет во многих случаях восстановить исходный профиль объекта с высокой точностью.
Мы проводили тестирование данной методики, решая задачу восстановления геометрии объектов, адсорбированных на поверхность плоской подложки. Анализ показал, что восстановленные по данной методике латеральные размеры объекта (ширина на полувысоте) существенно завышены при условии, что радиус кривизны объекта меньше радиуса кривизны кончика зонда (ошибка тем выше, чем больше разница радиусов). Это обстоятельство осложняет применимость рассматриваемой методики при исследованиях ряда биообъектов (отдельных макромолекул, их комплексов и пр.) в силу малости размеров последних в сравнении с радиусом кривизны кончика зонда АСМ. Так, при радиусе кривизны зонда 15 нм и радиусе объекта 2,5 нм (типичные значения для исследований биообъектов) погрешность (завышение) восстановленных значений ширины составляет для тестируемой методики более 50%.
В работе [37] предложена методика восстановления объема исследуемых частиц (по АСМ-профилю), не включающая стадию предварительного тестирования зонда: как геометрия зонда, так и геометрия объектов исследования, определяемые соответствующими радиусами кривизны, может быть восстановлена путем анализа одного и того же АСМ-изображения. Однако данная методика, включающая использование для описания геометрии поверхностных структур значение радиуса кривизны, сводит задачу к рассмотрению геометрии контакта сферического зонда и сферического образца.
Возможность получения в этом случае дополнительной информации (т.е. не только параметров объекта, но и зонда из одного АСМ-изображения) может быть проиллюстрирована следующим. Ниже приводится решение задачи определения истинной ширины (2a) эллипсоидального в сечении объекта по известным параметрам: высоте (2b), ширине АСМ-профиля на полувысоте (2d) и радиусу зонда R. При этом возможным оказывается получить дополнительные соотношения (2.38, 2.39), связывающие указанные параметры. Модель сферического образца позволяет описать его геометрию одним параметром - радиусом кривизны (без использования предположения о связи этого параметра с высотой объекта над поверхностью подложки). Подобное уменьшение числа параметров задачи позволяет извлечь, путем анализа геометрии контакта, дополнительную информацию.
Авторы работы [38], отмечая, что при достаточно ``остром'' профиле исследуемых поверхностных структур на АСМ-изображении будет отображаться лишь профиль более ``тупой'' иглы, при сравнительном анализе также оперируют параметрами соответствующих радиусов кривизны (зонда и исследуемых поверхностных структур).
Но, в силу имеющихся представлений о существенной роли контактных деформаций (раздел 2.1) в исследованиях АСМ, можно предположить, что модель сферической геометрии образца и использование для ее описания соответствующего радиуса кривизны вряд ли адекватна при решении задачи восстановления геометрии адсорбированных биообъектов, характеризующихся, как известно, невысокими значениями модуля упругости. Более общей является модель, позволяющая учесть эффект уширения при контакте иглы с деформированной (сплюснутой) частицей, имеющей эллипсоидальное сечение. Решение данной задачи позволяет определить объем частицы, выразив его через параметры эллиптического сечения: найденного значения a и связанного с высотой частицы значения b = h/2. Ниже приведен алгоритм решения данной задачи.
Применим для описания эффекта уширения геометрическую модель (рис. 2.8), учитывающую взаимодействие объекта только с кончиком зонда (предполагается, что нет контакта со стенками пирамиды). Это оправдано в том случае, когда высота исследуемых структур над подложкой не превышает радиуса кривизны кончика иглы.
|
Кончик зонда будем аппроксимировать либо полусферой радиуса R, либо параболоидом вращения (z = kr2, где k - коэффициент параболы). При этом результаты применения двух методик фактически тождественны: количественное расхождение в ответах составляет менее 10%. Стоит отметить, что аппроксимация иглы с помощью полусферы более наглядна и более широко используется в литературе.
Исследуемую частицу опишем моделью эллипсоида. Т.е. мы исходим из априорных представлений о контактной деформации образца под действием зонда, см. раздел 2.1. В сечении объекта исследования - эллипс с полуосями a и b. Ставится задача: по заданным значениям высоты объекта (h = 2b), параметра геометрии зонда R (или k для параболической аппроксимации) и ширины профиля АСМ-изображения частицы на ее полувысоте (2d) найти значение истинной ширины объекта 2a.
Запишем систему уравнений для эллипса (сечение профиля исследуемой частицы) и окружности (сечение профиля иглы):
|
Для решения задачи запишем условия для точки контакта с координатами (x0, y0): равенство касательных к эллипсу и к окружности (параболы) и удовлетворение координат точки контакта уравнениям эллипса и окружности (параболы):
| (2.33) |
Данная система аналитически сводится к одному уравнению с одним неизвестным (x0), которое можно решать численно. Для сферической иглы эти уравнения выглядят следующим образом:
| (2.34) |
| (2.35) |
Аналогично, для случая параболической иглы имеем уравнение относительно x0:
| (2.36) |
| (2.37) |
Аналитически можно показать, что полученное уравнение (2.34) для сферической иглы не имеет решения (на интересующем нас интервале) только в том случае, когда выполняется система неравенств:
| (2.38) |
Аналогично, уравнение для параболической иглы (2.36) не имеет решения на интересующем нас интервале в случае, когда выполняется условие:
| (2.39) |
Смысл данных ограничений очевиден: если измеренный АСМ-профиль объекта достаточно ``острый'', то игла, которой он был получен, не могла быть ``тупой''. Полученные соотношения (2.38, 2.39) являются, по-видимому, частным случаем общего подхода к оценке геометрии иглы, изложенного в работе [39]. Автор данной работы теоретически обосновывает возможность оценки ``остроты'' иглы (определение верхнего предела) путем анализа морфологии особенностей получаемого АСМ-изображения при произвольной, но достаточно неоднородной структуре исследуемой поверхности. Однако полученные соотношения (2.38, 2.39) более просты и наглядны, чем общий подход, изложенный в работе [39], и могут быть весьма полезны при интерпретации экспериментальных результатов.
Уравнения (2.34-2.37) использованы для построения численного решения (см. текст программы A.2): уравнения (2.34) и (2.36) решаются методом вилки [40] относительно x0, далее по уравнениям (2.35) и (2.37) определяется искомое значение a.
Изложенный метод является достаточно простым, кроме того, он имеет важную особенность: проверка выполнения условий (2.38) и (2.39) позволяет заранее определить случаи отсутствия решений и получить информацию о допустимом значении параметров геометрии зонда R или k.
Определение точного значения радиуса R (или k) для конкретного зонда требует его тестирования непосредственно перед использованием (по результатам исследования тест-объектов, например, вируса табачной мозаики - удобного природного ``наноразмерного'' объекта с фиксированными геометрическими параметрами, см. раздел #.#). Однако и в этом случае существует вероятность того, что в процессе сканирования форма иглы претерпит изменения в результате взаимодействия с объектом. В этой связи чрезвычайно полезным является получение информации о форме зонда непосредственно из АСМ-изображений объекта исследования.
При анализе АСМ-изображений объектов, для которых необходимо восстановить истинную ширину, измеряется пара значений: высота и ширина на полувысоте; результатом анализа является набранная статистика пар этих значений. Анализируя выполнимость соотношений (2.38, 2.39) при различных параметрах геометрии зонда, можно определить предельное значение R (или k) выше (для k - ниже) которого наблюдается рост числа случаев отсутствия решения (для набранной статистики пар значений параметров объекта b и d). Это и будет верхнее граничное значение для оцениваемого радиуса кривизны иглы. Типичный пример зависимости числа случаев отсутствия решения для набранной статистики пар b и h от радиуса кривизны иглы представлен на рис. #.#.
Следует подчеркнуть, что предложенная методика не учитывает возможного дополнительного вклада в уширение, связанного с частичным увлечением образца зондом при сканировании. Эффект увлечения обусловлен латеральными силами взаимодействия зонда и образца, которые характеризуются достаточно большой интенсивностью при проведении исследований в контактном режиме на воздухе. По нашим оценкам данный эффект, в основном, может проявляться при исследовании объектов, имеющих небольшую величину площади сечения (например, одиночных молекул ДНК), и приводить к 1,5-2,5-кратному завышению значения ширины объекта 2d и, как следствие, восстанавливаемого значения a.
Ослабить влияние эффекта увлечения образца зондом можно путем уменьшения интенсивности силового латерального взаимодействия зонда и образца. Это достигается при применении режима прерывистого контакта, особенно в случае проведения исследований в жидких средах.
Основная погрешность восстановленных значений a вносится погрешностью измерения полуширины АСМ-профиля объекта d. В меньшей степени погрешность решения (Da) зависит от погрешностей параметра геометрии зонда (DR или Dk) и погрешности измеренной высоты объекта (Db).
Погрешность измерения d может быть обусловлена описанным выше эффектом частичного увлечения объектов зондом при сканировании. Значительная асимметрия иглы также увеличивает эту погрешность, поскольку значения ширины в этом случае зависят от ориентации объектов. В силу этого стандартное отклонение восстановленных значений истинной ширины объектов исследования по результатам анализа их АСМ-изображений может превышать 20%. Увеличить точность результата исследования можно путем уменьшения эффекта увлечения (исследования в режиме прерывистого контакта в жидкости), а также (потенциально) путем определения и учета степени асимметрии иглы. Кроме того, величина ошибки может быть уменьшена при наборе достаточно большой статистики анализируемых параметров АСМ-изображений объектов.
Особенностями изложенного алгоритма восстановления реальной ширины объектов, адсорбированных на поверхность подложки, являются:
Этот алгоритм может служить прототипом для общего подхода восстановления геометрии объектов с учетом трехмерной геометрии иглы. Действительно, возможно обобщение задачи на трехмерный случай, что позволит использовать модель асимметричной иглы.
Ниже приведен текст программы, написанной на языке C++.
#include <math.h>
#include <stdlib.h>
#include <io.h>
#include <iostream.h>
double F,E1,E2,D,A,B,a,b,a0,b0,R1,R2,h,b_a_2,k,a_b,P,C;
double K_ell(double k_1) //first elleptical integral
{
double K_count = 1.0, q_count = 1.0, m;
m = (1.0 - k_1)/(1.0 + k_1);
for (int i = 1; i < 1000; i += 2)
{
q_count = q_count*i*i/(i + 1)/(i + 1)*m*m;
K_count = K_count + q_count;
};
return (M_PI/2.0*(1.0 + m)*K_count);
}
double E_ell(double k_1) //second elleptical integral
{
double E_count = 1.0, q_count = 1.0, m;
m = (1.0 - k_1)/(1.0 + k_1);
for (int i = 1; i < 1000; i += 2)
{
q_count = q_count*(i-2)*(i-2)/(i+1)/(i+1)*m*m;
E_count = E_count + q_count;
}
return (M_PI/2.0/(1.0 + m)*E_count);
}
main()
{
//Main parameters input
cout << "F = ? (nN)" << endl;
cin >> F;
F = F*1.0e-9;
cout << "E_sample = ? (GPa)" << endl;
cin >> E1;
E1 = E1*1.0e9;
cout << "E_probe = ? (GPa)" << endl;
cin >> E2;
E2 = E2*1.0e9;
D = 3.0/4.0*(1.0/E1 + 1.0/E2);
cout << "R_sample (cil, nm) = ?" << endl;
cin >> R1;
R1 = R1*1.0e-9;
cout << "R_probe (sph, nm) = ?" << endl;
cin >> R2;
R2 = R2*1.0e-9;
// probe/sample
A = 0.5*(1.0/R1 + 1.0/R2);
B = 0.5/R2;
// sample/substrate
// A = 0.5/R1;
// B = 0.5/(R2+2*R1);
//Exact solution
a = 0.1;
b = 1.0;
b_a_2 = b*b/a/a;
for (int i = 1; i < 1000; i++)
{
a_b = sqrt(1.0/b_a_2);
b_a_2 = A/B*K_ell(a_b)/E_ell(a_b);
b_a_2 = b_a_2 - A/B + K_ell(a_b)/E_ell(a_b);
};
b = 2.0*F*D/M_PI/B/(1.0 - a_b*a_b);
b = b*(K_ell(a_b) - E_ell(a_b));
b = pow(b, 1.0/3.0);
a = a_b*b;
h = 2.0*F*D/M_PI/b*K_ell(a_b);
P = F/M_PI/a/b;
cout << " Test: exactly" << endl;
a = a*1e9, b = b*1e9, h = h*1e9, P = P*1e-9;
cout << " a = " << a << " nm";
cout << " b = " << b << " nm" << endl;
cout << " h = " << h << " nm" << endl;
cout << " P = " << P << " MPa" << endl;
//Approximating solutions
// first: a sim b
cout << " Test: a sim b" << endl;
a = pow(2.0*F*D*(1.0/A + 1.0/B), 1.0/3.0);
a = a/(1.0 + A/B);
b = A*a/B;
h = 2.0*F*D/(a + b);
P = F/M_PI/a/b;
a = a*1e9, b = b*1e9, h = h*1e9, P = P*1e-9;
cout << " a = " << a << " nm";
cout << " b = " << b << " nm" << endl;
cout << " h = " << h << " nm" << endl;
cout << " P = " << P << " MPa" << endl;
//second: b>a
cout << " Test: b > a " << endl;
a = 0.1;
b = 1.0;
b_a_2 = b*b/a/a;
for (int i=1; i < 1000; i++)
{
C = log(4.0*sqrt(b_a_2)) - 1.0;
b_a_2 = A/B*C;
};
b = pow (2.0*C*F*D/M_PI/B, 1.0/3.0);
a = pow (4.0*B*F*F*D*D/M_PI/M_PI/C/A/A/A, 1.0/6.0);
P = F/M_PI/a/b;
h = 2*F*D*(C + 1.0)/M_PI/b;
a = a*1e9, b = b*1e9, h = h*1e9, P = P*1e-9;
cout << " a = " << a << " nm";
cout << " b = " << b << " nm" << endl;
cout << " h = " << h << " nm" << endl;
cout << " P = " << P << " MPa" << endl;
}
\tth_fileclose1cff00
Программа представляется достаточно простой: в качестве функций K_ell и E_ell реализованы процедуры вычисления полных эллиптических интегралов по асимпотикам, приведенным в [29]. Основная часть начинается с запроса параметров задачи, затем определяются параметры A и B (по формуле (2.12), если интересна область контакта образца и подложки, то следует использовать формулу (2.23)), после чего реализовано точное решение (по формулам (2.10), (2.11), (2.9). Для приближенного решения реализованы два случая: a ~ b (с использованием формул (2.21), (2.22) и a < b по формулам (2.17), (2.18). В качестве результата работы программа выдает найденные значения параметров области контакта (a и b), величину деформации h и контактное давление P.
Ниже приведен текст программы, написанной на языке С++.
#include <conio.h>
#include <stdio.h>
#include <math.h>
#include <fstream.h>
#include <stdlib.h>
#include <io.h>
#include <iostream.h>
double d_vtm, k, a, b, R, d, x, x1, x2;
int i, N, N1, N2, N_sph_bad, N_par_bad;
double sq(double z)
{
return (sqrt(fabs(R*R-(z-d)*(z-d))));
}
double func_sph(double z)
{
double temp = (b*b-(R-sq(z))*(R-sq(z)))*sq(z);
return (temp+z*(z-d)*(R-sq(z)));
}
double func_par(double z)
{
return (k*k*(z-d)*(z-d)*(z-d)*(z+d)+b*b);
}
double a_sph()
{
if (d > R) x1 = d-R;
else
{
if (b > R-sqrt(R*R-d*d)) return 0.0;
else x1 = 1e-6;
};
x2 = d;
for (int i = 1; i < N; i++)
{
x = (x1+x2)/2.0;
if (func_sph(x1)*func_sph(x) > 0.0) x1=x;
else x2=x;
};
if ((R-sq(x))*(R-sq(x))/b/b < 1.0)
{
return (x/sqrt(1.0-(R-sq(x))*(R-sq(x))/b/b));
}
else return 0.0; // flag: no solution
};
double a_par()
{
x1 = 1e-6;
x2 = d;
if (b > d*d*k) return 0.0;
else
{
for (int i = 1; i < N; i++)
{
x = (x1+x2)/2.0;
if (func_par(x1)*func_par(x)>0.0) x1 = x;
else x2 = x;
};
};
return sqrt (0.5*x*(x+d));
}
main()
{
ofstream outFile;
ifstream inFile;
outFile.open("RESULT.DAT");
inFile.open ("DATA.DAT");
cout <<" data file lenght?" << endl;
cin >> N1;
cout << " testing phase?" << endl;
cout << " 1 - yes" << endl;
cout << " 0 - no" << endl;
cin >> N2;
if (N2 == 1)
{
cout << " VTM width at half-height?" << endl;
cin >> d_vtm;
d_vtm = d_vtm/2.0;
R = (d_vtm*d_vtm-81.0)/18.0;
x = 0.5*(sqrt (d_vtm*d_vtm+648.0)-d_vtm);
k = sqrt (81.0-x*x)/(x-d_vtm)/(x-d_vtm);
cout << " for sphere, R=" << R << endl;
cout << " for parabola, k=" << k << endl;
cout << " Press any key..." << endl;
N2 = getch();
}
else
{
cout << " R (sphere)?" << endl;
cin >> R;
cout << " k (parabola)?" << endl;
cin >> k;
};
N = 1000;
cout << " sphere parabola" << endl;
for (int j = 1; j < N1; j++)
{
inFile >> d;
d = d/2.0;
inFile >> b;
b = b/2.0;
a = a_sph();
if (a != 0.0)
{
outFile << a << " ";
cout <<" a = "<< a << " ";
}
else
{
N_sph_bad++;
cout << " no" << " ";
outFile << "-" << " ";
};
a = a_par();
if (a != 0.0)
{
outFile << a << endl;
cout << " a = " << a << endl;
}
else
{
N_par_bad++;
cout << " no" << endl;
outFile << "-" << endl;
};
};
cout <<" Sphere wrong:" << N_sph_bad << endl;
cout <<" Parabola wrong:" << N_par_bad << endl;
};
\tth_fileclose1cff60
Программа реализована по следующей схеме. Как показал анализ, погрешность определяемых значений существенно зависить от погрешности входных параметров (особенно измеренной ширины профиля на полувысоте d). Для уменьшения этой погрешности необходим набор достаточной статистики для значений входных параметров - h (высоты) и d. Поэтому в программе ввод входных данных осуществляется в виде файла ("data.dat") состоящего из двух столбцов значений для h и для d соответственно. На этапе вычисления программа запрашивает о величине набранной статистики (количестве строк в файле "data.dat"). Вывод значений также осуществляется в файл (result.dat) в две колонки (для аппроксимации иглы сферой и параболой соответственно).
Функции func_sph и func_par построены по формулам (2.34, 2.36), далее, функции a_sph и a_par реализуют решение уравнений (2.34, 2.36) относительно x0 и, по найденному x0, вычисление искомого значения a по формулам (2.35, 2.37). Одновременно, эти функции осуществляют проверку выполнения условий (2.38, 2.39) отсутствия решений; подсчет числа случаев отсутствия решений ведут счетчики N_sph_bad и N_par_bad для сферической и параболической аппроксимаций соответственно.
Работа программы по желанию может быть предварена тестирующей фазой, в которой по измеренным параметрам АСМ-профиля тест-объекта (вируса табачной мозаики) определяются аппроксимирующие параметры иглы (R и k), минуя тестирующую фазу эти параметры можно задать вручную.
Основные параметры зондов промышленных кантилеверов (Nanoprobe, Digital Instruments, США) для атомно-силовых микроскопов приведены в таблице A.1.
| Модель | NP-S | FESP(W) | TESP(W) |
| Oxide Sharpened Silicon Nitride | Force Modulation Etched Silicon | Tapping Mode Etched Silicon | |
| Жесткость | 0,06 Н/м, 0,12 Н/м, 0,38 Н/м, 0,58 Н/м | 1-5 Н/м | 20-100 Н/м |
| Резонансная частота | 5-50 КГц | 60-100 КГц | 200-400 КГц |
| Радиус кривизны кончика иглы | 5-40 нм | 5-10 нм | 5-10 нм |
| Высота иглы | 3 мкм | 10-15 мкм | 10-15 мкм |
| Угол раствора конуса иглы | 35° | 18° Ъ25° Ъ10° | 18° Ъ25° Ъ10° |
| Отражающее покрытие | Золото | нет | нет |
| Длина кантилевера | 120 мкм, 200 мкм | 225 мкм | 125 мкм |
| Ширина кантилевера | 15 мкм, 40 мкм | 30 мкм | 30-40 мкм |
| Толщина кантилевера | 0,4-0,6 мкм | 2-3 мкм | 3,5-5 мкм |
| Форма кантилевера | V-образная | прямая | прямая |
{kind=link}
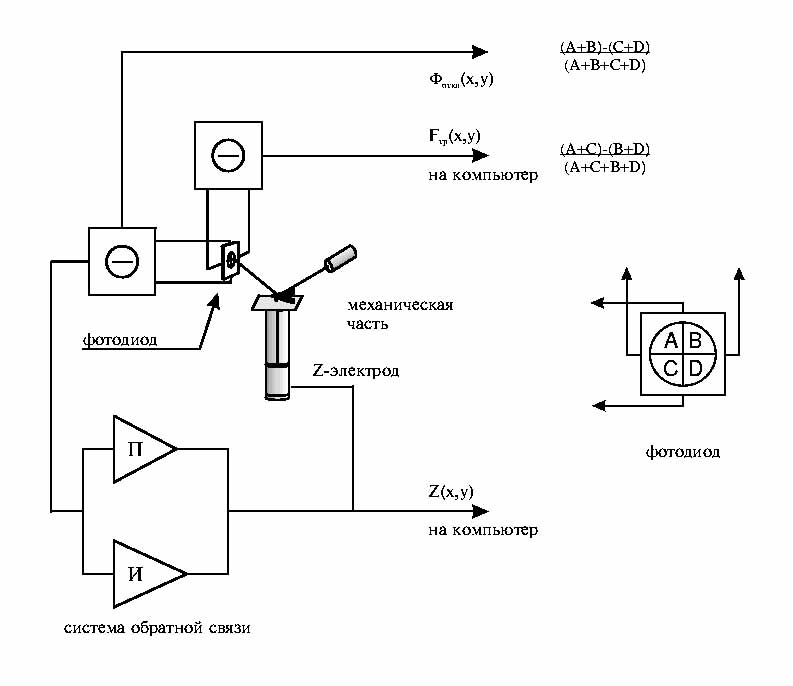{kind=link}
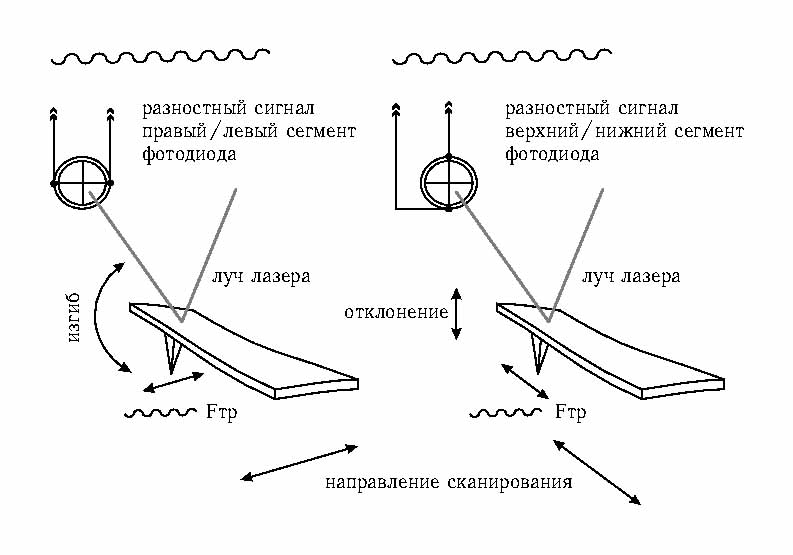{kind=link}
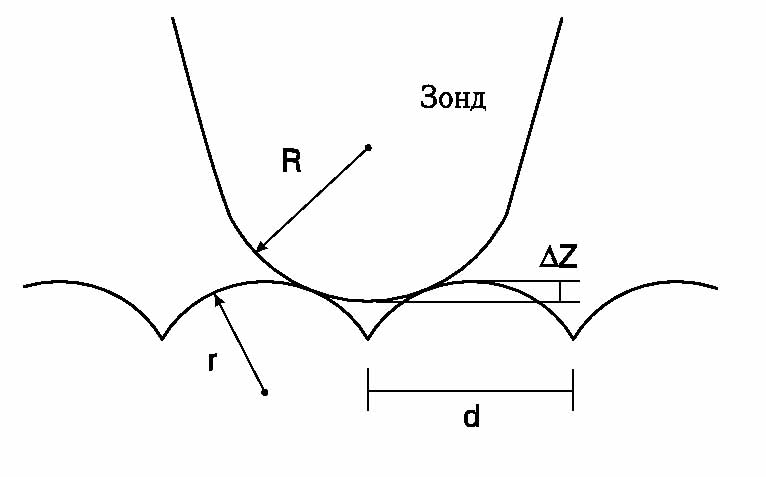{kind=link}
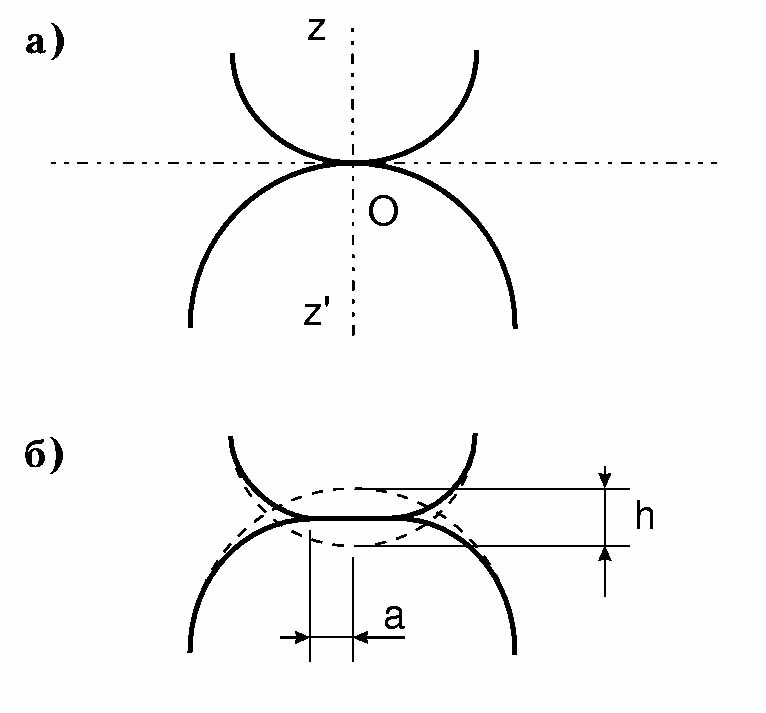{kind=link}
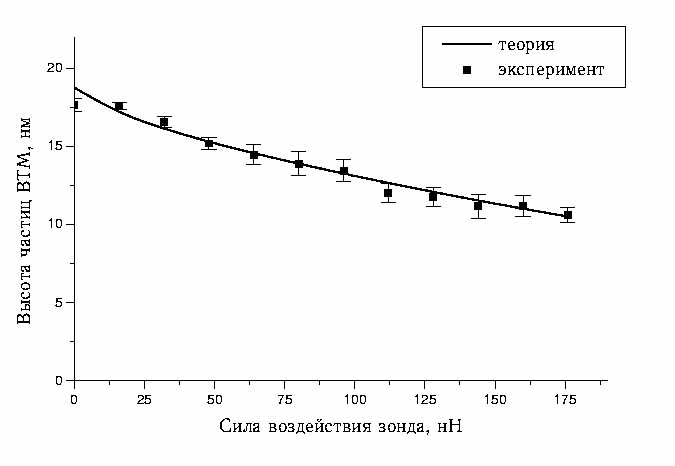{kind=link}
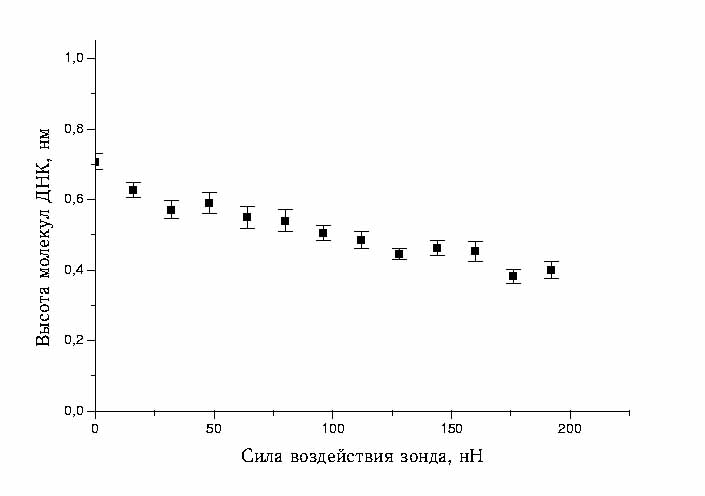{kind=link}
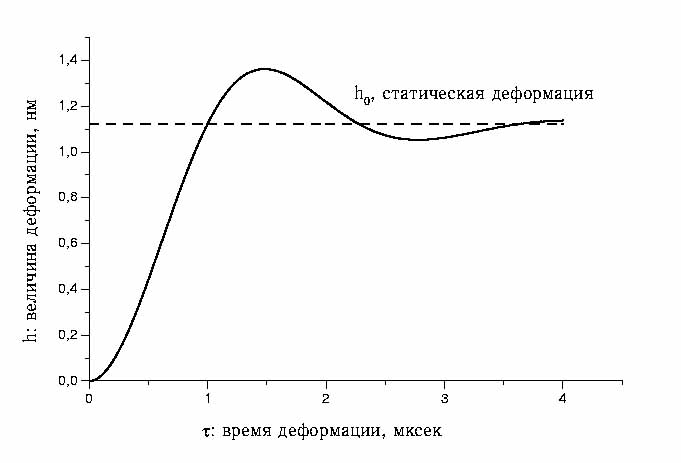{kind=link}
{kind=link}
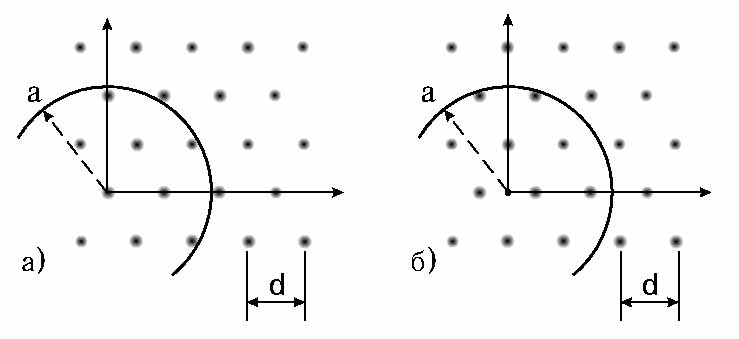{kind=link}
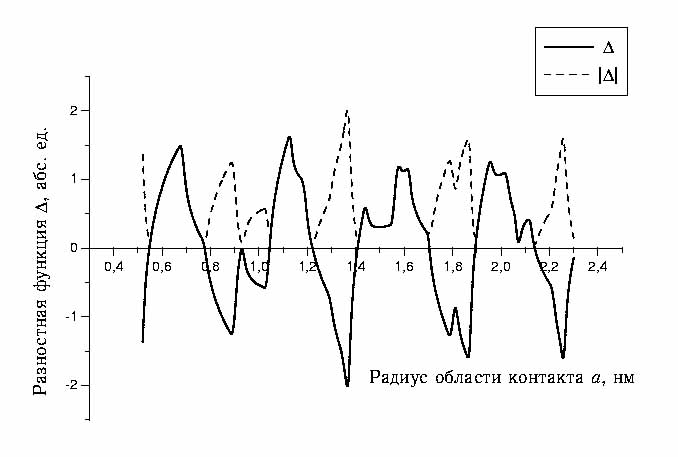{kind=link}
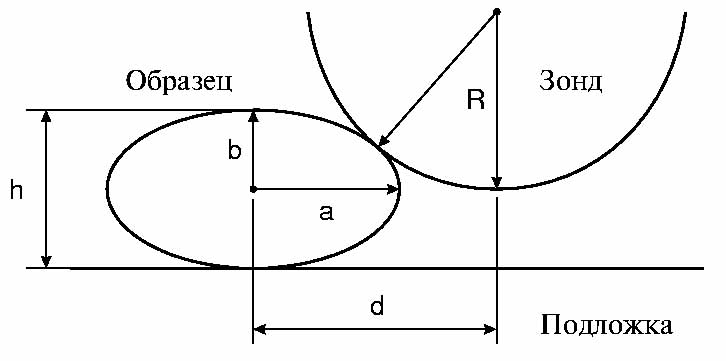{kind=link}